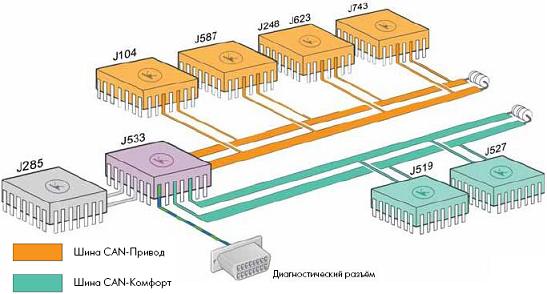
CAN-шина
CAN – стандарт обмена информации промышленной автоматики, призванный объединить в единое сообщество все многообразие электронного оборудования.
Протокол разработан на основе стандартов ISO передачи данных.
В середине 80-х годов прошлого столетия компании Intel и Robert Bosch GmbH разработали цифровое устройство для обмена данных, которое стало стандартом автомобильной
электроники.
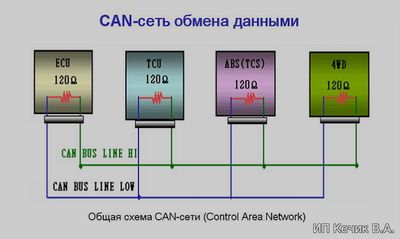
Подобно тому, как собираются в единую сеть несколько компьютеров, CAN собирает в цепь все электронные блоки автомобиля. Это делает управление более надежным, быстрым и эффективным. Кроме того, через кабель CAN происходит обмен данными между ЭБУ и сторонними электроприборами, что делает диагностику автомобиля максимально точной и быстрой.
- 1 Особенности устройства CAN-шины
- 2 Передача данных по Кан-шине
- 3 Обзор возможностей протокола CAN
- 4 Скорость передачи данных CAN-шины
- 5 Протоколы высокого уровня
- 6 Достоинства и недостатки протокола CAN
Особенности устройства CAN-шины
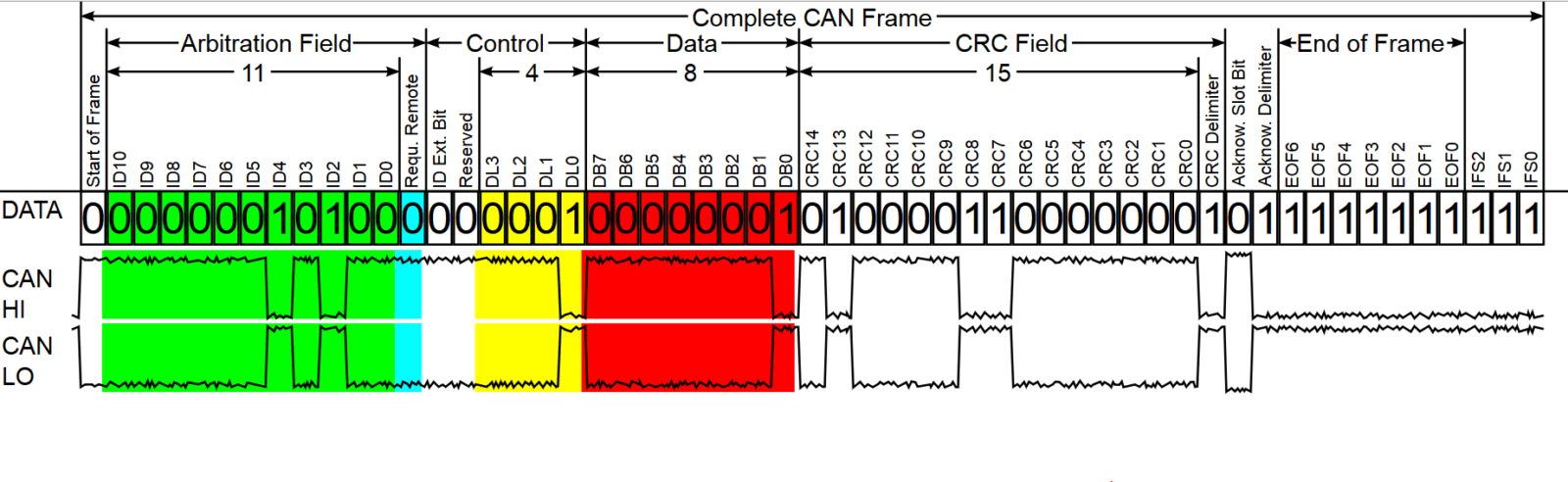
Передаются данные, со скоростью 1Мбит/сек, по радиоканалам или на оптоволоконном уровне. Биты данных одномоментно превращаются в кадры (подобие ограниченных порций). Есть сложная схема разделения кадров на доминантные и рецессивные и приоритетов формирования очереди передачи, с применением арбитража. Однако в эти области высоких технологий, простому автолюбителю заглядывать нет никакой нужды.
На физическом уровне CAN-сеть – это непрерывная «шина» дифференциальной пары, в роли проводника информации, прописанной стандартом ISO. Доступ к ней осуществляется посредством драйвера CAN-шины.

Во всех системах современного автомобиля применяется протокол CAN для взаимодействия электронного блока управления с контрольными блоками систем, исполнительными устройствами, датчиками, и в целом всей совокупности периферийного оборудования. Устройство столь умного прибора, на удивление, очень простое (можно сказать примитивное) – два провода и чип. Вот и все!
Первые поколения прибора были снабжены множеством выходов, по каждому их которых передавался лишь один сигнал. Сейчас, по каждому проводу проходят сотни импульсов.
В последних выпусках есть функции подключения к смартфонам.
Есть заложенная функция предвидения и устранения некоторых неполадок электрооборудования автомобиля. Даже электробрелки зажигания, подключаясь через CAN, получают необходимые данные от ЭБУ автомобиля.
CAN – шина, практически, абсолютно нечувствительна к радиопомехам, с высокой степени изолированными контактами.
Передача данных по Кан-шине
Сигналы с электронных приборов, параллельно соединенных в цепь Кан-шины, по двум сплетенным проводам (витой паре), поступает на полосы шины. При этом, на каждом проводе будет свое напряжение, отличное от напряжения во втором проводе.
Другие участники считывают эту информацию. Путем проставления фильтров и идентификаторов, зашифрованных в самом послании, определяется адресат сообщения.
Тот, получив наказ на какое-либо действие, спешит его выполнить.
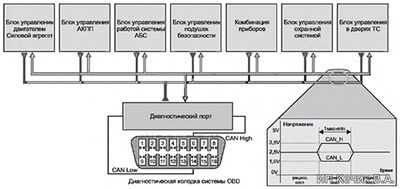
В покое, напряжение в проводах витой пары одинаковое и составляет 2,5В. Это, так называемое, рецессивное положение. Во время начала сеанса, провода приводятся в возбуждение участником, посылающим сообщение. Напряжение на одном из проводов (CAN High) начинает возрастать, достигая 3,5В. На другом (CAN low) – убывать, до достижения отметки 1В.
Каждое звено общей цепи подключается к CAN кабелю посредством трансивера, в котором разность двух напряжений преобразуется в одно, выходное (2В). Его и получают участники процесса. Таким образом, исключается влияние на обмен информации, непостоянство напряжения электрической сети автомобиля.
Обзор возможностей протокола CAN
- Продукты — микросхема, инструменты разработки, модули, инструменты проектирования;
- Распределение посланий — каждый участник будет иметь возможность выбирать к просмотру сообщения, касающиеся только его. Для этого предусмотрены фильтры;
- Широковещательный характер – если участник не выбрал только свои сообщения, то он имеет возможность просмотра всего потока информации;
- Контентная адресация – нет явного адресата. Выбираются адреса контента по идентификатору в самом сообщении;
- Виды сообщений – кадр данных, удаленный, ошибки, перезагрузки;
- СтандартныйCANи его расширенная версия – отличаются длиной установленного идентификатора. Если в станд. варианте он равен 11битам, то в его «толстом» собрате – 29 бит;
- Конфликтное разрешение и определение приоритета – чтобы избежать одновременной передачи данных несколькими участниками, выработан арбитражный механизм. Все пакеты поделены на доминантный и рецессивный. Не вдаваясь в подробности, отметим только, что всегда приоритет на стороне доминантного сообщения.
- Физические уровни:
— сигнальная сбалансированная двухпроводная схема high–speed CAN представляет вторую часть стандарта ISO 11898;
— третья часть ISO 11898 составляет следующий уровень вышеназванной схемы;
— однопроводной уровень, описываемый стандартом SAE J2411. Шины этого уровня установлены, например, на автомобилях линейки Дженерал Моторс.
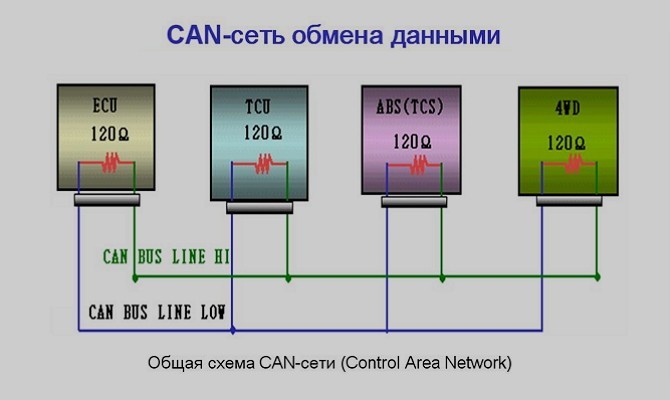
- Прерывание конца – CAN-шина должна содержать на конце резисторное сопротивление (120ОМ), для гашения отражения сигнала, создания уровня постоянного тока.
- Кабель – сопротивление должно укладываться в интервал 108 – 132ОМ.
- Разъем – нет стандартов для разъемов CAN. Каждый протокол описывает свои предпочтения. Однако есть фактический стандарт для автопромышленности.
- Ошибка – контролер найдет ее и отметит флажком, разрушая передачу. Эти флажки станут знаком для всех участников цепи на ее сброс.
- Сбои в передачи – при различных сбоях дается возможность дальнейшего функционирования. Сбои могут быть разного характера: прерывание, короткое замыкание в разных частях, разъединение с оконечным сопротивлением.
Скорость передачи данных CAN-шины
Все составляющие сети CAN должны иметь единую скорость передачи информации. Однако данный стандарт не задает одного определенного параметра, ограничиваясь лишь максимальным пределом – 1Мбит/с. Изменения объема передаваемого кадра должно успеть распространиться по всей длине сети, что ставит в обратную зависимость скорости от протяженности – чем длиннее провод, тем ниже скорость. Для передачи 1Мбита за 1секунду нужная длина должна составлять не менее 40 метров. Добавьте к этому объективные факторы, снижающие скорость – защита от помех и разветвленная сеть, где происходят множественные отражения сигнала.
В угоду ускорения процесса, разработчики уменьшают протяженность проводов, одновременно увеличивая число цепей, с возможностью подключения большего количества приборов. Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две, и т. д. цепи.
Протоколы высокого уровня
CAN всего лишь решает проблему доставки информации из одного пункта в другой, малыми пакетами (всего 8 байт). Многие аспекты обмена данных, остаются вне его компетенции. Ввиду большого спроса на рынке, незамедлительно, появились разработки усовершенствованных протоколов – так называемые, протоколы высокого уровня. Они взялись оказывать более расширенный пакет услуг. Ими пользуются, когда нужно:
- Задать стандарты запуска, в т.ч. скорости обмена;
- Распределение, предварительно распознанных, адресов взаимодействующих элементов и видов сообщений;
- Точная разметка послания;
- Порядок разбора ошибок.
Достоинства и недостатки протокола CAN
Протокол CAN вошел в состав стандартного протокола OBD-II.
К несомненным преимуществам CAN относятся:
- Передача информации в реальном времени;
- Простота и дешевизна использования;
- Помехоустойчивость;
- Обеспечение доступа, путем арбитража, без снижения пропускных характеристик сети;
- Контроль всех ошибок обмена данных;
- Большой интервал рабочих скоростей;
- Широкое его применение, большое разнообразие ассортимента от разных поставщиков.
К недостаткам относятся:
- Маленький объем одного пакета данных, который составляет не более 8 байт;
- Служебные данные занимают больше объема, чем передаваемые, что значительно влияет на скорость (разработчикам есть куда расширяться);
- Нет общего стандарта на протоколы повышенного уровня. В CAN можно прописать любой протокол, если его исполнение помещается в рамках пропускной способности CAN.
Применяется этот протокол не только в автомобильной промышленности. В некоторых отраслях промышленности, дорожного строительства, при строительстве высокотехнологичных объектов (так называемые, умные дома), в велосипедном производстве.
—>Автозапчасти и СТО —>
Бортовые системы электроники в современных легковых и грузовых автомобилях обладают огромным количеством дополнительных устройств и исполнительных механизмов. Для того, чтобы обмен информацией между всеми устройствами был максимально эффективен, в автомобиле должна быть надежная коммуникационная сеть. В начале 80-ых годов 20 века компания Bosch и разработчик Intel предложили новый сетевой интерфейс – Controller Area Network, который в народе называется Can-шина.
О принципе работы сетевого интерфейса CAN-шина
Кан-шина в автомобиле предназначена для обеспечения подключения любых электронных устройств, которые способны передавать и получать определенную информацию. Таким образом, данные о техническом состоянии систем и управляющие сигналы проходят по витой паре в цифровом формате. Такая схема позволила снизить негативное влияние внешних электромагнитных полей и существенно увеличить скорость передачи данных по протоколу (правила, по которым блоки управления различными системами способны обмениваться информацией).
Кроме того, диагностика ЭБУ различных систем автомобиля своими руками стала проще. За счет применения подобной системы в составе бортовой сети автомобиля высвободилось определенное количество проводников, которые способны обеспечивать связь по различным протоколам, например, между блоком управления двигателем и диагностическим оборудованием, системой сигнализации. Именно наличие Кан-шины в автомобиле позволяет владельцу своими руками выявлять неисправности контроллеров и ошибки с помощью специального диагностического оборудования.
CAN-шина – это специальная сеть, с помощью которой осуществляется передача и обмен данными между различными узлами управления. Каждый из узлов состоит из микропроцессора (CPU) и CAN-контроллера, с помощью которого реализуется исполняемый протокол и обеспечивается взаимодействие с сетью автомобиля. Шина Кан имеет минимум две пары проводов – CAN_L и CAN_H, по которым и передаются сигналы посредством трансиверов – приемо-передатчиков, способных усиливать сигнал от управляющих устройств сети. Кроме того, трансиверы выполняют и такие функции как:
- регулировка скорости передачи данных посредством усиления или уменьшения подачи тока;
- ограничение тока для предотвращения повреждения датчика или замыкания линий передачи;
- тепловая защита.
На сегодняшний день признаны два вида трансиверов – High Speed и Fault Tolerant. Первый тип наиболее распространен и соответствует стандарту (ISO 11898-2), он позволяет передавать данные со скоростью до 1МБ в секунду. Второй тип приемопередатчиков позволяет создать энергосберегающую сеть, со скоростью передачи до 120 Кб/сек, при этом подобные передатчики не имеют чувствительности к каким-либо повреждениям на самой шине.
Особенности работы сети
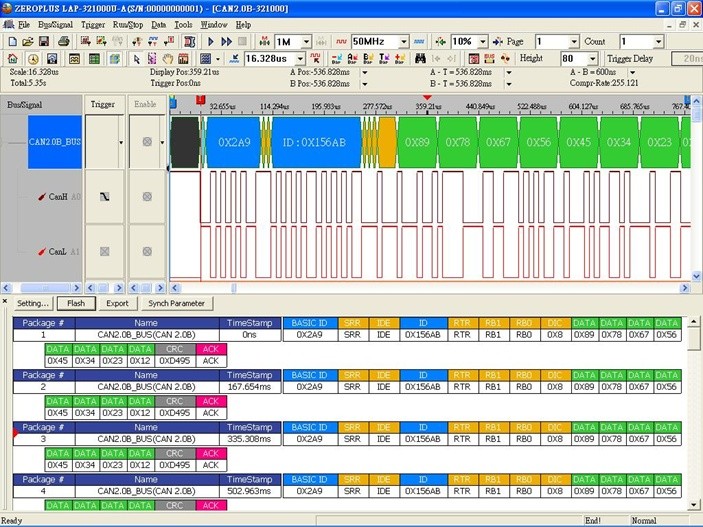
Следует понимать, что данные по CAN-сети передаются в виде кадров. Наиболее важные из них – это поле идентификатора (Identifire) и система данных (Data). Наиболее часто используемый тип сообщения по Кан-шине – Data Frame. Данный тип передачи данных состоит из так называемого арбитражного поля и определяет приоритетную передачу данных в том случае, если сразу несколько узлов системы передают данные на CAN-шину.
Каждое из подключенных к шине устройств управления имеет свое входное сопротивление, а общая нагрузка рассчитывается из суммы всех подключенных к шине исполняемых блоков. В среднем, входное сопротивление систем управления двигателем, которые подключаются на CAN-шину, составляет 68-70 Ом, а сопротивление информационно-командной системы может составлять до 3-4 ОМ.
CAN — интерфейс и диагностика системы
Системы управления CAN имеют не только различное нагрузочное сопротивление, но и разную скорость передачи сообщений. Этот факт усложняет обработку однотипных сообщений внутри бортовой сети. Для упрощения диагностики на современных автомобилях используется межсетевой интерфейс (преобразователь сопротивления), который либо выполнен в качестве отдельного управляющего блока, либо встроен в ЭБУ двигателя автомобиля.
Подобный преобразователь также предназначен для ввода или вывода определенной диагностической информации по проводу «К»-линия, который подключается во время диагностики или изменения параметров работы сети либо в диагностический разъем либо непосредственно к преобразователю.
Важно отметить, что определенных стандартов для разъемов сети Can на сегодняшний день не существует. Поэтому каждый из протоколов определяет свой тип разъемов на CAN-шине, в зависимости от нагрузки и других параметров.
Таким образом, при проведении диагностических работ своими руками используется унифицированный разъем типа OBD1 или OBD2, который можно встретить на большинстве современных иномарок и отечественных автомобилей. Однако, некоторые модели автомобилей, например Volkswagen Golf 5V, Audi S4, не имеют межсетевого интерфейса. Кроме того, схема блоков управления и CAN-шины индивидуальна для каждой марки и модели авто. Для того, чтобы провести диагностику CAN-системы своими руками, используется специальная аппаратура, которая состоит из осциллографа, анализатора CAN и цифрового мультиметра.
Работы по выявлению неисправностей начинаются со снятия напряжения сети (снятие минусовой клеммы АКБ). Далее определяется изменение сопротивления между проводами шины. Самыми распространенными видами неисправности Кан-шины в автомобиле является замыкание или обрыв линии, выход из строя резисторов нагрузки и снижение уровня передачи сообщений между элементами сети. В некоторых случаях без применения анализатора Can выявить неисправность не получается.
Основные режимы работы CAN-шины: активный (зажигание включено); спящий (при выключенном зажигании); пробуждение и засыпание (при включении и выключении зажигания). Во время спящего режима ток потребления шины минимальный. Однако при этом по шине (с меньшей частотой) передаются сигналы о состоянии открытия дверей и окон, других систем, связанных с охранными функциями автомобиля.
В большинстве современных диагностических устройств предусмотрен режим диагностирования ошибок по CAN-шине. Технически это организовано непосредственным подключением проводников к диагностическому разъему.
Преимущества и недостатки применения КАН-шины в автомобиле Начать следует с того, что, если бы в 80-х годах прошлого века не был предложен стандарт CAN, его место обязательно занял другой вид взаимодействия систем автомобиля. Можно, конечно, разместить все блоки управления системами автомобиля в едином суперблоке, в котором программно обеспечить взаимодействие разных систем. Такие попытки были у французских производителей. Однако, с увеличением функциональности и производительности значительно увеличивается вероятность отказов. Сбои, например, дворников, могут привести к отказу запуска двигателя. Основные преимущества применения CAN-шины: возможность проведения оперативного контроля и диагностики всех систем автомобиля; объединение потоков информации в едином помехозащищенном канале; универсальность, способствующая унификации процессов диагностирования; возможность подключения охранных систем по CAN-шине (нет необходимости тянуть проводку к каждому элементу контроля). Недостатки CAN-шины: невысокая надежность; повреждение одного из блоков управления может привести к полной неработоспособности CAN-соединения. Устранение неисправностей На приборной панели автомобиля отсутствует индикаторная лампа неисправности CAN. Судить о том, что работоспособность CAN-шины нарушается, можно по косвенным показателям: на приборной панели одновременно загорелись несколько индикаторных ламп неисправностей; пропали показатели температуры охлаждающей жидкости, уровни топлива; загорелся «CHECK ENGINE». Прежде всего, следует выполнить диагностику. Если она покажет на неисправность CAN-шины, следует приступить к устранению проблемы. Последовательность работ: Найти проводники витой пары шины. Часто они имеют черный (высокий уровень) и оранжево-коричневый (низкий) цвета. Проверить при включенном зажигании с помощью мультиметра напряжения на проводниках. Уровни не должны быть равны 0 или более 11 Вольт (обычно около 4,5 Вольта). Выключить зажигание, снять клемму аккумуляторной батареи. Измерить сопротивление между проводниками. Если оно будет стремиться к нулю, значит, в шине присутствует короткое замыкание, если к бесконечности – обрыв. Приступить к поиску обрыва или короткого замыкания. Если есть подозрение на то, что замыкание шины происходит по причине отказа какого-либо блока управления, можно последовательно отключать блоки управления и контролировать сопротивление и работоспособность шины. Неисправность CAN-шины относится к сложным неисправностям электрооборудования автомобиля. Если у автовладельца нет необходимых навыков ремонта электрики, то лучше воспользоваться услугами специалиста.
CAN-шина – это электронное устройство, встроенное в электронную систему автомобиля для контроля технических характеристики и ездовых показателей. Она является обязательным элементом для оснащения автомобиля противоугонной системой, но это лишь малая часть её возможностей.
Источник: lubimauto.ru, voditeliauto.ru.
https://elm327.club/diagnostika-avto/can-shina.html
http://www.vk-sto.by/blog/kak_opredelit_can_shinu_v_avtomobile_samostojatelno/2019-12-17-85