Что собой представляет CAN-шина в автомобиле
- 1 Что такое CAN шина в машине
- 2 Устройство шины и где располагается
- 3 Технические характеристики
- 4 Принцип работы
- 5 Преимущества и недостатки встроенных шин
- 6 Маркировка и разновидности
- 7 Потенциальные проблемы
- 8 Заключение
Обилием электроники в современных автомобилях уже никого не удивишь. Всё больше узлов и систем становятся «умными», так как подключаются к электронным устройствам, использующим для работы сложные алгоритмы.

Для коммуникаций между точками подключения и базой необходимо использовать какую-то разводку. Избавиться от чрезмерной паутины проводов помогают специальные шины. Кроме автомобильной отрасли их могут задействовать и для других целей.
Что такое CAN шина в машине
Тем автомобилистам, которые хотят узнать, что это такое, не стоит обращаться к каталогам зимней или летней резины. Рекомендуем углубить свои знания в электронике.
CAN шина автомобиля – это часть электронной системы автомобиля, предназначенная для быстрого мониторинга технического состояния транспортного средства в целом и отдельных его элементов и систем.
В машину CAN-шина монтируется для объединения датчиков и процессоров в единую информационную сеть, помогающую синхронизации команд и обработке информации. Благодаря ей происходит сбор данных и мгновенный обмен ими. За счет параллельного подключения обеспечивается возможность корректировки отправляемых сигналов для систем или узлов через датчики на лету.
CAN является аббревиатурой и расшифровывается как Controller Area Network, что может переводиться как «сеть из контроллеров». Фактически шина занимается приемом информации от расположенных вокруг устройств и отправкой данных на такие устройства. Разработка и первые внедрения стандарта проводились еще более трех десятилетий назад.
Устройство шины и где располагается
Визуально CAN является блоком из пластика, внутри которого располагаются печатные платы. С внешней стороны шины чаще всего находится универсальный разъем, предназначенный для подсоединения различных кабелей.
За цифровой интерфейс отвечают встроенные проводники, которые принято называть CAN. Подключение осуществляется через специальный кабель.
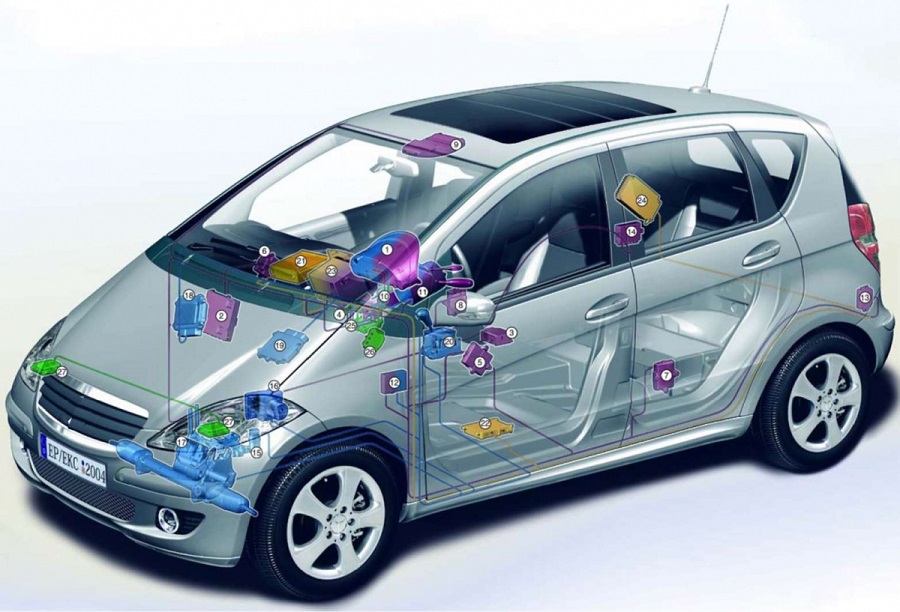
В разных марках автомобилей шины расположены могут быть в разных местах. Конкретную область, где вмонтирован блок, можно узнать из инструкции по эксплуатации автомобиля. Чаще всего такую электронику располагают в салоне транспортного средства, скрывая ее контрольным щитом. В некоторых брендах принято устанавливать электронный узел в подкапотной области.
Технические характеристики
От эксплуатационных параметров зависит скорость взаимодействия между элементами системы, а также качество связи между ними. Чаще всего характеристики большинства современных шин имеют следующие значения:
- информация по проводной бортовой сети передается со скоростью примерно 1 Мб/с;
- в процессе обмена данными между отдельными блоками управления показатель скорости снижается до 500 кб/c;
- информация передается в интерфейсах, аналогичных «Комфорт», с невысокой скоростью – близко к 100 кб/с.
Чем новей модель автомобиля, тем прогрессивней в ней стоит разводка. При возможных неполадках придется искать аналоги.
Принцип работы
У каждого элемента в системе предусмотрен специальный идентификатор, так как работает электроника по принципу передачи закодированных сообщений. Таким образом удается распознавать различного рода информацию, например, «авто движется со скоростью 60 км/ч» или «скорость вращения коленвала 2000 об/мин». Проверка осуществляется индикатором. Если информация в сообщении относится к сфере конкретного блока, то она проходит обработку, в противном случае данные игнорируются.
Стандартная длина идентификатора лимитирована 11 либо 29 битами. Конструкция каждого информационного передатчика рассчитана также на считывание параметров, отправляемых по интерфейсу. Для узлов, обладающих невысоким приоритетом, характерно освобождение потока данным от доминантных устройств. Таким образом последний тип не искажает процесс передачи.
Пакеты данных от приоритетных устройств курсируют с первоочередной срочностью, незатронутые искажением. Если произошла потеря связи сети с каким-либо передатчиком, то электроника автоматически проводит восстановление.
Интерфейс шины в автомобиле, подключенный к модулю автозапуска либо к сигнализации, способен запускаться и работать в разных режимах:
- Фоновый режим. В некоторых источниках его называют спящим либо автономным. При его запуске остальные системы автомобиля отключаются. Хотя видимых явных признаков нет, как он работает, но питание от бортовой сети к цифровому интерфейсу отправляется. При этом значение напряжения будет минимальным, так как такая CAN шина быстро разрядит аккумулятор в автомобиле.
- Запуск или пробуждение. Запуск осуществляется после того, как автомобилист вставляет в замочную скважину ключ и активирует подобным способом зажигание. Когда в автомобиле стоит кнопка «Пуск/стоп», то режим стартует после ее нажатия. Происходит стабилизация напряжения. На контроллеры и датчик поступает электропитание.
- Активация. После перехода в данный режим исполнительное устройство начинает обмен данными с встроенными регуляторами. Заметно поднимается напряжение в цепи, так как интерфейс шины CAN работает с потреблением до 80-85 мА.
- Деактивация. В режим засыпания система переходит после остановки двигателя. Также в это время перестают работать и обмениваться данными включенные в сеть к шине узлы и системы. Происходит их отключение от сети.

Выход в рабочий режим и прекращение работы занимает считанные доли секунды. Все случается без непосредственного вмешательства пользователя в автоматическом режиме.
Преимущества и недостатки встроенных шин
Как и у каждой системы у CAN-шины есть свои позитивные негативные характеристики. Основные плюсы заключаются в таких факторах:
- за счет высокого быстродействия устройства способны практически мгновенно связываться пакетными данными;
- кабельные установки выдерживают воздействие электромагнитых помех;
- электроника наделена системой контроля с несколькими уровнями, что способствует минимизации возникновения ошибок во время приема/передачи пакетов данных;
- за счет автоматики шина самостоятельно распределяет по CANалам скорость, оказывая позитивное влияние на работу электронных систем в целом;
- производители позаботились о достаточной степени безопасности цифрового интерфейса, поэтому внешние несанкционированные подключения будут мгновенно заблокированы;
- использование в конструкции цифрового интерфейса позволяет без проблем осуществлять монтаж сигнализации либо иных систем безопасности с минимальным взаимодействием с бортовой штатной системой.
Важно знать минусы установки шин:
- определенные модели интерфейсов рассчитаны на лимитированный объем пакетных данных, что является малоприемлемым для современных автомобилей, нашпигованным большим количеством электроники. Если добавлять к шине новых источников данных, то это негативно скажется на нагрузке, а также существенно повысит время отклика оборудования;
- передаваемые данные по каналам связи обладают исключительным назначением. Полезная информация отнимает минимум трафика;
- может случаться отключение стандартизации из-за внедрения протокола повышенного уровня.

Более стабильно работают интерфейсы последних поколений. Предпочтительней выбирать машины с такими шинами.
Маркировка и разновидности
Со своей задачей связи дополнительных устройств с ЭБУ большинство шин успешно справляется, работая в бесперебойном режиме. В такой ситуации используется протокол CAN ISO 15765-4.
Принято условно делить CAN на группы:
- CAN2, 0В. Маркировка характерна для оборудования, используемого в 11-битном формате. При этом необходимо учитывать, что информация о потенциальных ошибках будет отправляться на микропроцессоры во время обнаружения 29-битных идентификаторов.
- CAN2, 0А. Эта маркировки задействуется для устройств с 11-битными форматами обмена данными. У разновидности отсутствует потенциал выявления ошибок от 29-битных модулей.
Пользователи выделяют три категории интерфейсов:
- Первая категория предназначена для автомобильного двигателя. После подключения подобных видов интерфейсов улучшиться коммуникация с управляющей системой по дополнительному каналу. За счет такой шины удается качественно синхронизировать работу ЭБУ с другими узлами.
- Вторая категория является разновидностью «Комфорт». Интерфейс востребован для обеспечения коннекта с подогревом кресел, управлением зеркалами, комфортными регулировками и пр.
- Третья категория относится к разряду командно-информационных разновидностей. Применяется для соединения с обслуживающими системами, например, для подключения навигации или смартфона.
Используются протоколы, согласно которым предусмотрены разные типы команд, отправляемые по CAN.
Потенциальные проблемы
Так как шина находится в связи с большим количеством элементов, то некорректная работа способна приводить к негативным результатам эксплуатации. Это может сказаться не только на работоспособности авто, но и на безопасности вождения.
Сообщать о неисправности система может косвенными признаками. Водителям стоит на нее обратить внимание, в следующих случаях:
- загорелся индикатор Check Engine;
- беспричинно практически одновременно бортовой щиток засветился несколькими иконками, например, стояночный тормоз, подушки безопасности, высокое давление смазки и пр.
- считывание информации на приборной доске стало невозможным, так как не выводится информация о температуре охлаждения, уровне топлива и пр.
Необходимо заняться обязательным более точным тестирование. Квалифицированно его смогут провести на станции техобслуживания, потому что автосервисы оснащены профессиональным оборудованием.
Заключение
Наличие электроники в автомобиле вынуждает производителей внедрять разные интерфейсы. Надёжная работа шин обеспечивает стабильную эксплуатацию транспортного средства.
Автомобильный справочник
для настоящих любителей техники
Шина CAN в автомобиле
Шина CAN в автомобиле — это сеть контроллеров, предназначенных для обеспечения подключения электронных устройств, которые способны передавать и получать определенную информацию. Такая схема подключения позволила снизить негативное влияние внешних электромагнитных полей и существенно увеличить скорость передачи данных.

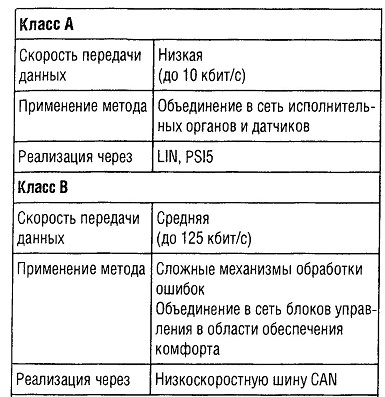
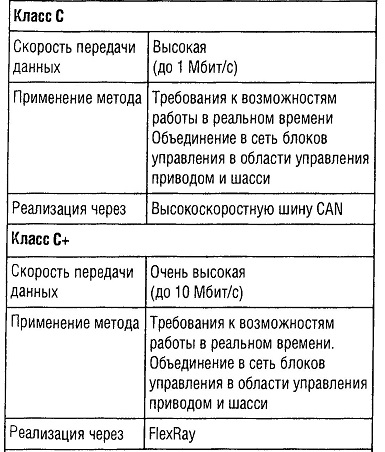
Классификация шинных систем автомобиля
 |  |
Шина CAN была признана стандартом с момента своего появления в серийно выпускаемых автомобилях в 1991 году. Но она также часто используется и в автоматизации. Основные особенности:
- Передача сообщений с ранжированием приоритетов и неразрушающим арбитражем;
- Снижение затрат благодаря использованию недорогой витой пары и простого протокола с невысокими требованиями к вычислительной мощности;
- Скорость передачи данных до 1 Тбит/с у высокоскоростной шины CAN и до 125 Кбит/с у низкоскоростной шины CAN (более низкие расходы на аппаратную часть);
- Высокая надежность передачи данных за счет распознавания и сигнализации спорадических и постоянных неисправностей и благодаря унифицированию сетевых процессов через acknowledge;
- Принцип много абонентской шины;
- Высокая степень готовности за счет обнаружения неисправных станций;
- Стандартизация по ISO 11898.
Система передачи данных по шине CAN
Логические состояния шин и шифрование
Для обмена данными шина CAN использует два состояния «доминантное» и «рецессивное», с помощью которых передаются информационные биты. Доминантное состояние соответствует «0», а рецессивное — «1». Для шифрования передачи используется процесс NRZ (без возврата на ноль), в котором нулевое состояние не всегда возвращается в промежуток между двумя одинаковыми состояниями передачи и, соответственно, необходимый для синхронизации временной интервал между двумя фронтами может оказаться слишком большим.
В основном используется двухпроводной кабель, в зависимости от окружающих условий, с витой или не витой парой. Две шинные линии называются CAN-H и CAN-L (рис. «Уровень напряжения передачи по CAN» ).
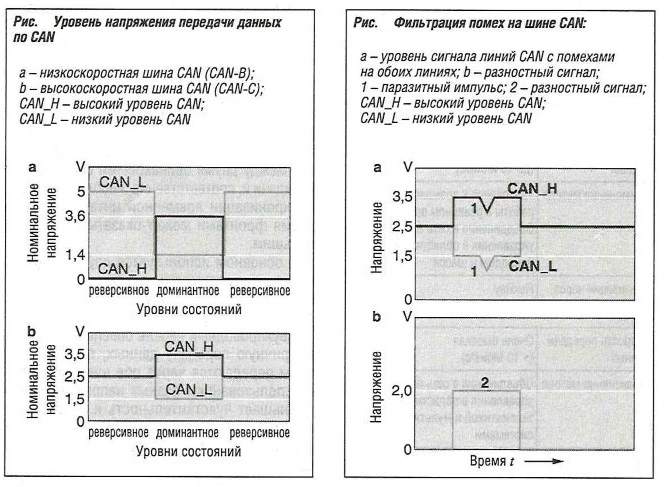
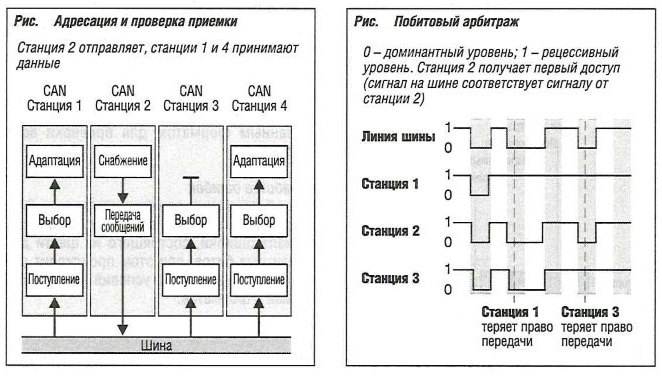
Двухпроводный кабель обеспечивает симметричную передачу данных, при которой биты передаются через обе шинные линии с использованием разных напряжений. Это уменьшает чувствительность к синфазным помехам, поскольку помехи влияют на обе линии и могут быть отфильтрованы путем создания разности (рис. «Фильтрация помех по шине CAN» ).
Однопроводный кабель представляет собой способ сокращения производственных затрат за счет экономии на втором кабеле. Однако общее подключение к массе, выполняющей функцию второго кабеля, должно быть доступно для этой цели всем пользователям шины. Поэтому однопроводный вариант шины CAN возможен только для системы связи с ограниченным монтажным пространством. Передача данных по однопроводному кабелю более чувствительна к излучаемым помехам — он не позволяет фильтровать импульсы помех так, как в двухпроводном кабеле. В результате на шинной линии требуется сигнал более высокого уровня. Это, в свою очередь, отрицательно сказывается на излучении помех. Поэтому необходимо снизить крутизну фронта импульсов сигналов шины по сравнению с двухпроводным кабелем. Это связано с уменьшением скорости передачи данных. По этой причине однопроводной кабель используется только для низкоскоростной шины CAN в области кузова и электроники для функций комфорта. Например, низкоскоростная шина CAN с двухпроводным кабелем в случае обрыва кабеля должна продолжать работать как однопроводная система. Однопроводное решение не описывается в спецификации CAN.
Уровни напряжения шины CAN
Высокоскоростные и низкоскоростные шины CAN используют разные уровни напряжения для передачи доминантных и рецессивных состояний. Уровни напряжения низкоскоростной шины CAN показаны на рис. а, «Уровень напряжения передачи по CAN», а высокоскоростной — на рис. Ь, «Уровень напряжения передачи по CAN».
Высокоскоростная шина CAN в рецессивном состоянии на обеих линиях использует номинальное напряжение 2,5 В. В доминантном состоянии на CAN-H и CAN-L подается номинальное напряжение 3,5 В и 1,5 В, соответственно. В низкоскоростной шине CAN в рецессивном состоянии на CAN-H подается напряжение 0 В (максимум 0,3 В), на CAN-L — 5 В (минимум 4,7 В). В доминантном состоянии на CAN-H напряжение составляет не менее 3,6 В, а на CAN-L не более 1,4 В.
Предельные значения
Для арбитражного метода в случае CAN важно, чтобы все узлы в сети видели биты идентификатора фрейма одновременно, чтобы узел, передавая бит, видел, передают ли их другие узлы. Задержки возникают из-за распространения сигнала в шине данных и обработки в трансивере. Таким образом, максимально допустимая скорость передачи данных зависит от общей длины шины. Стандарт ISO предусматривает скорость 1 Мбит/с для 40 м. У более длинных проводов возможная скорость передачи данных примерно обратно пропорциональна длине провода. Сети с дальностью 1 км могут работать со скоростью 40 кбит/с.
Протокол CAN
Конфигурация шины
CAN работает в соответствии с принципом многорежимного управления, при котором линейная структура шины подсоединяет несколько блоков управления равного приоритета ранжирования.
Адресация по содержанию CAN использует адресацию по содержанию сообщений. Каждому сообщению присваивается метка-идентификатор, который классифицирует содержание сообщения (например, о частоте вращения коленчатого вала двигателя). В каждой станции ведется обработка только тех сообщений, чьи идентификаторы накапливаются в приемочном списке сообщений. Это называется приемочной проверкой (рис. «Адресация и проверка приемки» ). Таким образом, CAN не требует адресов станции для передачи данных. Это облегчает адаптацию к различным уровням оборудования.
Логические состояния шины CAN
Протокол CAN основывается на двух логических состояниях: биты информации являются или «рецессивными» (логическое состояние 1), или «доминантными» (логическое состояние 0). Когда, по крайней мере, одной из станций передается доминантный бит, тогда перезаписываются рецессивные биты, одновременно посылаемые ото всех других станций.
Назначение приоритетов
Идентификатор присваивает адреса данным как содержания, так и приоритета посылаемых сообщений. Идентификаторы, соответствующие низким бинарным числам, используют высокий приоритет и наоборот.
Арбитраж шины CAN
Каждая станция может начать передачу сообщения только после освобождения шины. Когда несколько станций начинают передавать сообщения одновременно, для разрешения создаваемых конфликтов доступа к шине используется арбитраж «wired-and» (монтажное И). Сообщению с высшим приоритетом (наименьшим двоичным значением идентификатора) присваивается право первого доступа, без задержек и потерь битов (рис. «Побитовый арбитраж» ). Передатчики реагируют на невозможность получения доступа к шине путем автоматического переключения в режим приема; затем ими повторяется попытка передачи, как только шина снова освобождается.
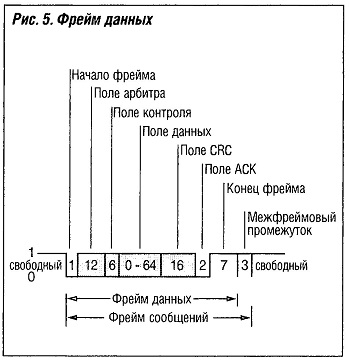
Фрейм данных и формат сообщения Шина CAN поддерживает два разных формата сообщений, различающихся только длиной идентификаторов. Стандартный формат включает 11 битов, в то время как расширенная версия состоит из 29 битов. Таким образом, рамка передачи данных содержит максимум 130 битов стандартного или 150 битов расширенного формата. Это обеспечивает минимальное время ожидания до последующей передачи, которая может быть срочной. Фрейм данных состоит из семи последовательных полей (рис. «Фрейм данных» ). «Начало фрейма» показывает начало сообщения и синхронизирует все узлы.
Поле «арбитра» состоит из идентификатора сообщения и дополнительного контрольного бита. Во время передачи этого поля передающее устройство сопровождает передачу каждого бита проверкой о том, что сообщение более высокого приоритета, которое могло бы аннулировать санкционированный доступ, не передается. Контрольный бит определяет, будет ли сообщение классифицироваться как «фрейм данных» или «дистанционный фрейм».
Поле «контроля» содержит код, показывающий количество байтов данных в поле «данных».
Поле «данных» содержит от 0 до 8 байтов. Сообщение длиной 0 данных может быть использовано для синхронизации распределительных процессов.
Поле «CRC» (периодический резервный контроль) содержит контрольную сумму для обнаружения возможных помех при передаче.
Поле «АСК» (уведомление) содержит сигналы подтверждения, с помощью которых получатели подтверждают доставку сообщений.
«Конец фрейма» обозначает конец сообщения.
Затем идет «межфреймовый промежуток», отделяющий фрейм от следующего фрейма.
Инициация передатчика
Передатчик обычно инициирует передачу данных посредством отправки фрейма данных. Однако приемник также может запросить данные от передатчика, отправив дистанционный фрейм. Этот дистанционный фрейм имеет тот же идентификатор, что и соответствующий фрейм данных. Они различаются битом, стоящим после идентификатора.
Обнаружение ошибок
Контролирующими отличительными признаками ошибок являются:
- 15-битовый CRC: (каждый приемник сравнивает получаемую им последовательность CRC с вычисляемой последовательностью);
- Контроль: каждый передатчик считывает с шины собственное переданное сообщение и сравнивает каждый переданный и отсканированный бит;
- Заполнение битами: (между началом фрейма и концом поля CRC каждого фрейма данных или дистанционного фрейма могут находиться максимум пять последовательных битов одной полярности); передатчик реализует пять последовательных битов одной полярности путем вставки в поток битов бита противоположной полярности. После доставки сообщений получатели снова удаляют эти биты;
- Проверка фреймов: (протокол CAN содержит несколько битовых полей со смешанным форматом для проверки всех станций).
Обработка ошибок
При обнаружении ошибки контроллер CAN прерывает текущую передачу отправкой сигнала ошибки, состоящего из шести доминантных битов; при этом происходит сознательное нарушение условия наполнения битами и форматов.
Локализация неисправностей
Так как неисправные станции могут значительно ухудшать нагрузочный режим шины, бортовые контроллеры связи могут включать механизмы, которые позволяют различать промежуточную и постоянную ошибки из-за неисправности местной станции. Этот процесс базируется на статистической оценке условий возникновения ошибок.
Варианты исполнения
Изготовители полупроводников предлагают различные варианты исполнения контроллеров CAN, различающиеся в основном возможностями хранения и обработки сообщений. Таким образом, главный компьютер может быть освобожден от операций, связанных с протоколом.
Стандартизация
Шина CAN стандартизирована для обмена данными в автомобилях; для низкоскоростной передачи (до 125 кбит/с) — ISO 11898-3, для высокоскоростной передачи (более 125 кбит/с) — ISO 11898-2 и SAE J 1939 (грузовики и автобусы).
CAN с таймерным управлением
Расширенный протокол CAN с возможностью работы в режиме таймерного управления называется «CAN с таймерным управлением» (TTCAN). В нем можно произвольно выбрать соотношение компонентов с таймерным управлением и компонентов с управлением событиями, поэтому он полностью совместим с сетями CAN. TTCAN стандартизируется в ISO 11898-4.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Добавить комментарий Отменить ответ
Главы
- Энциклопедия техники (19)
- История автомобиля (20)
- Полезные советы (3)
- Действующие единицы (1)
- Законы физики в автомобиле (15)
- Математическое моделирование в автомобилестроении (3)
- Материалы для автомобилестроения (10)
- Рабочие жидкости (5)
- Детали машин (6)
- Способы соединения деталей (8)
- Физика автомобиля (10)
- Двигатели внутреннего сгорания (24)
- Диагностика двигателя (8)
- Нормы контроля и диагностики токсичности отработавших газов (17)
- Системы управления бензиновыми двигателями (11)
- Работа двигателя на альтернативных видах топлива (2)
- Системы управления дизельными двигателями (9)
- Альтернативные виды приводов (3)
- Трансмиссия (47)
- Системы шасси (18)
- Управление шасси и активная безопасность (6)
- Кузова автомобилей (10)
- Пассивная безопасность (1)
- Системы охраны автомобилей (1)
- Охранные автомобильные системы (1)
- Электрооборудование автомобилей (11)
- Свечи зажигания автомобилей (6)
- Автомобильная электроника (21)
- Системы комфорта и удобства (2)
- Пользовательские интерфейсы (3)
- Системы повышения безопасности дорожного движения (7)
О справочнике
За последние время автомобилестроение превратилось в чрезвычайно сложную отрасль. Все труднее и труднее становится представить всю отрасль в целом, и еще сложнее постоянно следить за направлениями, которые важны для автомобилестроения. Многие из этих направлений подробно описаны в специальной литературе. Тем не менее, для тех, кто впервые сталкивается с данными темами, имеющаяся специальная литература не представляется легкой и тяжело усваивается в ограниченные сроки. В этой связи этот «Автомобильный справочник» будет очень кстати. Он структурирован таким образом, чтобы быть понятным даже для тех читателей, которые впервые встречаются с каким-либо разделом. Наиболее важные темы, относящиеся к автомобилестроению, собраны в компактном, простом для понимания и удобном с практической точки зрения виде.
https://drivertip.ru/osnovy/chto-takoe-can-shina-v-avtomobile.html
https://press.ocenin.ru/shiny-can-v-avtomobilyah/




